Model
神经网络中的前向和反向传播可以用一组操作来表示,比如卷积和池化。每个操作都需要一 些输入的tensors,并应用一个operator来生成输出的张量。 通过将每个运算符表示为一个节点,将每个张量表示为一条边,所有的运算就形成了一个计 算图。有了计算图,可以通过调度运算的执行和内存的智能分配/释放来进行速度和内存优 化。在 SINGA 中,用户只需要使 用Model API 定义神经网络模型,计算图则会在 C++后台自动构建和优化。
这样,一方面,用户使用Model API 按照 PyTorch 那样的命令式编程风格实现 网络。而与 PyTorch 在每次迭代中重新创建操作不同的是,SINGA 在第一次迭代后就会缓 冲操作,隐式地创建计算图(当该功能被启用时)。因此,另一方面,SINGA 的计算图与使 用声明式编程的库(如 TensorFlow)创建的计算图类似,因而它可以享受在图上进行的优 化。
样例
下面的代码说明了ModelAPI 的用法:
- 将新模型实现为 Model 类的子类:
class CNN(model.Model):
def __init__(self, num_classes=10, num_channels=1):
super(CNN, self).__init__()
self.conv1 = layer.Conv2d(num_channels, 20, 5, padding=0, activation="RELU")
self.conv2 = layer.Conv2d(20, 50, 5, padding=0, activation="RELU")
self.linear1 = layer.Linear(500)
self.linear2 = layer.Linear(num_classes)
self.pooling1 = layer.MaxPool2d(2, 2, padding=0)
self.pooling2 = layer.MaxPool2d(2, 2, padding=0)
self.relu = layer.ReLU()
self.flatten = layer.Flatten()
self.softmax_cross_entropy = layer.SoftMaxCrossEntropy()
def forward(self, x):
y = self.conv1(x)
y = self.pooling1(y)
y = self.conv2(y)
y = self.pooling2(y)
y = self.flatten(y)
y = self.linear1(y)
y = self.relu(y)
y = self.linear2(y)
return y
def train_one_batch(self, x, y):
out = self.forward(x)
loss = self.softmax_cross_entropy(out, y)
self.optimizer(loss)
return out, loss
- 创建 model、optimizer、device 等的实例。编译模型:
model = CNN()
# initialize optimizer and attach it to the model
sgd = opt.SGD(lr=0.005, momentum=0.9, weight_decay=1e-5)
model.set_optimizer(sgd)
# initialize device
dev = device.create_cuda_gpu()
# input and target placeholders for the model
tx = tensor.Tensor((batch_size, 1, IMG_SIZE, IMG_SIZE), dev, tensor.float32)
ty = tensor.Tensor((batch_size, num_classes), dev, tensor.int32)
# compile the model before training
model.compile([tx], is_train=True, use_graph=True, sequential=False)
- 迭代训练:
for b in range(num_train_batch):
# generate the next mini-batch
x, y = ...
# Copy the data into input tensors
tx.copy_from_numpy(x)
ty.copy_from_numpy(y)
# Training with one batch
out, loss = model(tx, ty)
这个例子的 Google Colab notebook 可以 在这里找 到。
更多例子:
实现
图的构建
SINGA 分三步构建计算图:
- 将操作保存在缓冲区。
- 分析操作的依赖性。
- 根据依赖关系创建节点和边。
以 MLP 模型的 dense 层的矩阵乘法运算为例,该操作会 在MLP model的 前向函数中被调用:
class MLP(model.Model):
def __init__(self, data_size=10, perceptron_size=100, num_classes=10):
super(MLP, self).__init__()
self.linear1 = layer.Linear(perceptron_size)
...
def forward(self, inputs):
y = self.linear1(inputs)
...
线性层由mutmul运算符组成,autograd通过 SWIG 调用 CPP 中提供的Mult函数来
实现matmul运算符。
# implementation of matmul()
singa.Mult(inputs, w)
At the backend, the Mult function is implemented by calling GEMV a CBLAS
function. Instead of calling GEMV directly, Mult submits GEMV and the
arguments to the device as follows, 在后端,Mult函数是通过调用GEMV一个 CBLAS
函数来实现的。但Mult没有直接调用GEMV,而是将GEMV和参数提交给设备,具体如下
。
// implementation of Mult()
C->device()->Exec(
[a, A, b, B, CRef](Context *ctx) mutable {
GEMV<DType, Lang>(a, A, B, b, &CRef, ctx);
},
read_blocks, {C->block()});
Device的Exec函数对函数及其参数进行缓冲。此外,它还拥有这个函数要读写的块的信
息(块是指张量的内存块)。
一旦Model.forward()被执行一次,所有的操作就会被Device缓冲。接下来,对所有操
作的读写信息进行分析,用来建立计算图。例如,如果一个块b被一个操作 O1 写入,之
后又被另一个操作 O2 读出,我们就会知道 O2 依赖于 O1 并且有一条从 A 到 B 的有向边
,它代表了块b(或其张量)。之后我们就构建了一个有向无环图,如下图所示。该图会
构建一次。
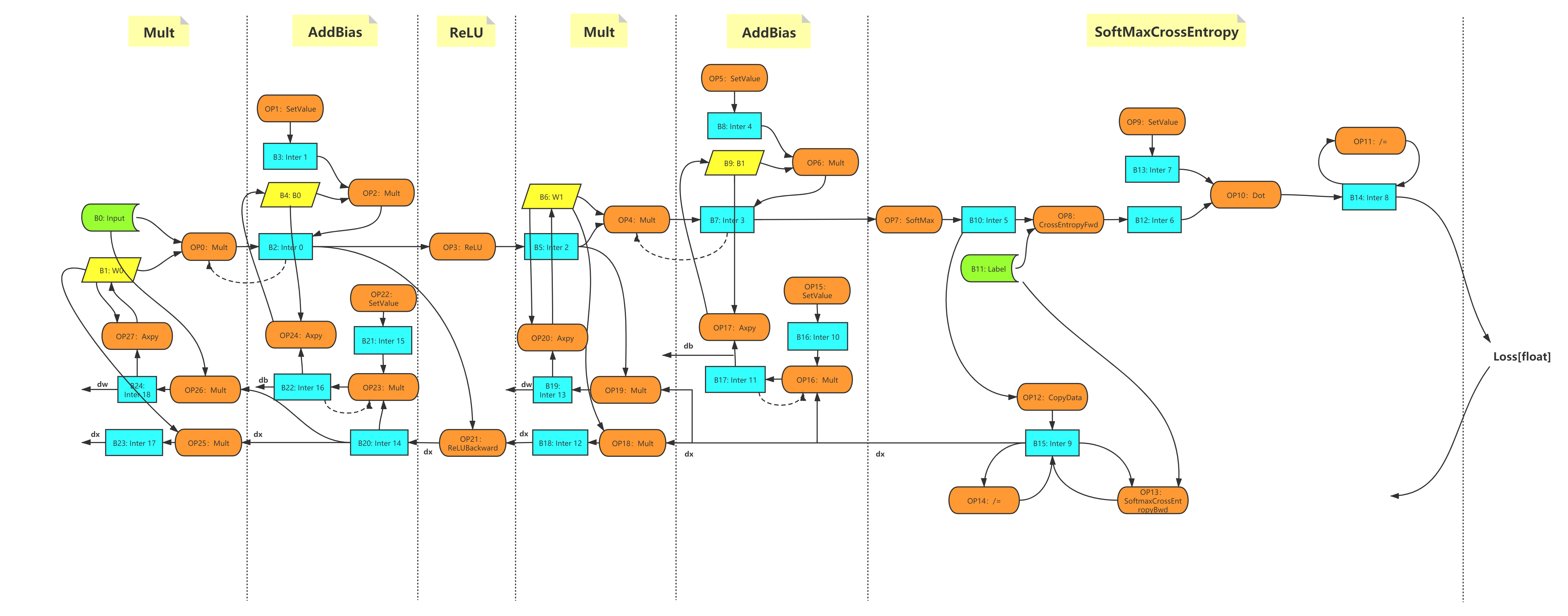
Figure 1 - MLP 例子的计算图
优化
目前,基于计算图进行了以下优化:
惰性分配 当创建张量/块时,设备不会立即为它们分配内存。相反,是在第一次访问块 时,才会分配内存。
自动回收 每个张量/块的参考计数是根据图计算出来的。在执行操作之前,参考计数是 读取这个块的操作次数。在执行过程中,一旦执行了一个操作,每一个输入块的参考数就会 减少 1,如果一个块的参考数达到了 0,就意味着这个块在剩下的操作中不会再被读取。因 此,它的内存可以被安全释放。此外,SINGA 还会跟踪图外的块的使用情况。如果一个块被 Python 代码使用(而不是被 autograd 操作符使用),它将不会被回收。
内存共享 SINGA 使用内存池,如CnMem来管理
CUDA 内存。有了自动回收和内存池,SINGA 就可以在张量之间共享内存。考虑两个操
作c=a+b和d=2xc。在执行第二个操作之前,根据惰性分配原则,应该分配 d 的内存。
假设a在其余操作中没有使用。根据自动回收,a的块将在第一次操作后被释放。因此
,SINGA 会向 CUDA 流提交四个操作:加法、释放a、分配b和乘法。这样,内存池就可
以将a释放的内存与b共享,而不是要求 GPU 为b做真正的 malloc。
其他的优化技术,如来自编译器的优化技术,如常见的子表达式消除和不同 CUDA 流上的并 行化操作也可以应用。
新的操作符
autograd模块中定义的每个运算符都实现了两个功能:前向和反向,通过在后台调用运算
符来实现。如果要在autograd中添加一个新的运算符,需要在后台添加多个运算符。
以Conv2d运 算符为例,在 Python 端,根据设备类型,从后台调用运算符来实现前向和反向功能:
class _Conv2d(Operation):
def forward(self, x, W, b=None):
......
if training:
if self.handle.bias_term:
self.inputs = (x, W, b) # record x, W, b
else:
self.inputs = (x, W)
if (type(self.handle) != singa.ConvHandle):
return singa.GpuConvForward(x, W, b, self.handle)
else:
return singa.CpuConvForward(x, W, b, self.handle)
def backward(self, dy):
if (type(self.handle) != singa.ConvHandle):
dx = singa.GpuConvBackwardx(dy, self.inputs[1], self.inputs[0],
self.handle)
dW = singa.GpuConvBackwardW(dy, self.inputs[0], self.inputs[1],
self.handle)
db = singa.GpuConvBackwardb(
dy, self.inputs[2],
self.handle) if self.handle.bias_term else None
else:
dx = singa.CpuConvBackwardx(dy, self.inputs[1], self.inputs[0],
self.handle)
dW = singa.CpuConvBackwardW(dy, self.inputs[0], self.inputs[1],
self.handle)
db = singa.CpuConvBackwardb(
dy, self.inputs[2],
self.handle) if self.handle.bias_term else None
if db:
return dx, dW, db
else:
return dx, dW
对于后台的每一个操作符,应按以下方式实现:
假设操作符是
foo(),它的真正实现应该包装在另一个函数中,例 如_foo()。foo()将_foo和参数一起作为 lambda 函数传递给Device的Exec函 数进行缓冲,要读和写的块也同时被传递给Exec。lambda 表达式中使用的所有参数都需要根据以下规则获取:
值捕获: 如果参数变量是一个局部变量,或者将被立刻释放(例如,中间时序)。否 则,一旦foo()存在,这些变量将被销毁。引用捕获:如果变量是记录在 python 端或者是一个持久变量(例如 Conv2d 类中的 参数 W 和 ConvHand)。可变捕获: 如果在_foo()中修改了由值捕获的变量,则 lambda 表达式应带有 mutable(可变)标签。
下面是一个在后台实现的操作 的例子:
Tensor GpuConvBackwardx(const Tensor &dy, const Tensor &W, const Tensor &x,
const CudnnConvHandle &cch) {
CHECK_EQ(dy.device()->lang(), kCuda);
Tensor dx;
dx.ResetLike(x);
dy.device()->Exec(
/*
* dx is a local variable so it's captured by value
* dy is an intermediate tensor and isn't recorded on the python side
* W is an intermediate tensor but it's recorded on the python side
* chh is a variable and it's recorded on the python side
*/
[dx, dy, &W, &cch](Context *ctx) mutable {
Block *wblock = W.block(), *dyblock = dy.block(), *dxblock = dx.block();
float alpha = 1.f, beta = 0.f;
cudnnConvolutionBackwardData(
ctx->cudnn_handle, &alpha, cch.filter_desc, wblock->data(),
cch.y_desc, dyblock->data(), cch.conv_desc, cch.bp_data_alg,
cch.workspace.block()->mutable_data(),
cch.workspace_count * sizeof(float), &beta, cch.x_desc,
dxblock->mutable_data());
},
{dy.block(), W.block()}, {dx.block(), cch.workspace.block()});
/* the lambda expression reads the blocks of tensor dy and w
* and writes the blocks of tensor dx and chh.workspace
*/
return dx;
}
Benchmark
单节点
- 实验设定
- 注释:
s:second,秒it: iteration,迭代次数Mem:peak memory usage of single GPU,单 GPU 显存峰值Throughout:number of images processed per second,每秒处理的图像数Time:total time,总时间Speed:iterations per second。每秒迭代次数Reduction:the memory usage reduction rate compared with that using layer,与使用层的内存使用率相比,内存使用率降低了多少Speedup: speedup ratio compared with dev branch,与 dev 分支相比的加速率
- 结果:
Batchsize Cases Mem(MB) Time(s) Speed(it/s) Throughput Reduction Speedup 16 layer 4975 14.1952 14.0893 225.4285 0.00% 1.0000 model:disable graph 4995 14.1264 14.1579 226.5261 -0.40% 1.0049 model:enable graph, bfs 3283 13.7438 14.5520 232.8318 34.01% 1.0328 model:enable graph, serial 3265 13.7420 14.5540 232.8635 34.37% 1.0330 32 layer 10119 13.4587 7.4302 237.7649 0.00% 1.0000 model:disable graph 10109 13.2952 7.5315 240.6875 0.10% 1.0123 model:enable graph, bfs 6839 13.1059 7.6302 244.1648 32.41% 1.0269 model:enable graph, serial 6845 13.0489 7.6635 245.2312 32.35% 1.0314
多线程
- 实验设置:
- API:
- 使用层: ResNet50 in resnet_dist.py
- 使用模型: ResNet50 in resnet.py
- GPU: NVIDIA RTX 2080Ti * 2
- MPI: 在同一节点上的两个 MPI processes
- API:
- 注释: 与上面相同
- 结果:
Batchsize Cases Mem(MB) Time(s) Speed(it/s) Throughput Reduction Speedup 16 layer 5439 17.3323 11.5391 369.2522 0.00% 1.0000 model:disable graph 5427 17.8232 11.2213 359.0831 0.22% 0.9725 model:enable graph, bfs 3389 18.2310 10.9703 351.0504 37.69% 0.9507 model:enable graph, serial 3437 17.0389 11.7378 375.6103 36.81% 1.0172 32 layer 10547 14.8635 6.7279 430.5858 0.00% 1.0000 model:disable graph 10503 14.7746 6.7684 433.1748 0.42% 1.0060 model:enable graph, bfs 6935 14.8553 6.7316 430.8231 34.25% 1.0006 model:enable graph, serial 7027 14.3271 6.9798 446.7074 33.37% 1.0374
结论
- 在启用计算图的情况下进行训练,可以显著减少内存占用。
- 目前,在速度上有一点改进。在效率方面还可以做更多的优化。